Introducción
Habíamos visto que una recta en \({\mathbb{R}^3}\) puede definirse a través de un sistema de 2 ecuaciones lineales con 3 incógnitas. Por ejemplo:
\[r:\;\left\{ {\begin{array}{*{20}{c}}{x + z = 1}\\{x – y – z = 3}\end{array}} \right.\]
Este sistema puede expresarse de un modo sencillo como un producto de matrices, como sigue:
\[\left( {\begin{array}{*{20}{c}}1&0&1\\1&{ – 1}&{ – 1}\end{array}} \right)\left( {\begin{array}{*{20}{c}}x\\y\\z\end{array}} \right) = \left( {\begin{array}{*{20}{c}}1\\3\end{array}} \right)\]
Donde \(A = \left( {\begin{array}{*{20}{c}}1&0&1\\1&{ – 1}&{ – 1}\end{array}} \right) \in {\mathbb{R}^{2 \times 3}}\) es la matriz de coeficientes del sistema.
Generalizando, dado un sistema de \(m\) ecuaciones lineales con \(n\) incógnitas:
\[\left\{ {\begin{array}{*{20}{c}}{{a_{11}}\;{x_1} + {a_{12}}\;{x_2} + \ldots + {a_{1n}}\;{x_n} = {b_1}}\\{{a_{21}}\;{x_1} + {a_{22}}\;{x_2} + \ldots + {a_{2n}}\;{x_n} = {b_2}}\\ \ldots \\ \ldots \\ \ldots \\{{a_{m1}}\;{x_1} + {a_{m2}}\;{x_2} + \ldots + {a_{mn}}\;{x_n} = {b_m}}\end{array}} \right.\]
dicho sistema puede ser expresado mediante un producto de matrices:
\[\left( {\begin{array}{*{20}{c}}{{a_{11}}}&{{a_{12}}}& \ldots &{{a_{1n}}}\\{{a_{21}}}&{{a_{22}}}& \ldots &{{a_{2n}}}\\ \vdots & \vdots & \ddots & \vdots \\{{a_{m1}}}&{{a_{m2}}}& \ldots &{{a_{mn}}}\end{array}} \right)\;\left( {\begin{array}{*{20}{c}}{{x_1}}\\{{x_2}}\\ \vdots \\{{x_n}}\end{array}} \right) = \left( {\begin{array}{*{20}{c}}{{b_1}}\\{{b_2}}\\ \vdots \\{{b_m}}\end{array}} \right)\]
siendo:
\(A = \left( {\begin{array}{*{20}{c}}{{a_{11}}}&{{a_{12}}}& \ldots &{{a_{1n}}}\\{{a_{21}}}&{{a_{22}}}& \ldots &{{a_{2n}}}\\ \vdots & \vdots & \ddots & \vdots \\{{a_{m1}}}&{{a_{m2}}}& \ldots &{{a_{mn}}}\end{array}} \right) \in {\mathbb{R}^{{\rm{mxn}}}}\) la matriz de coeficientes del sistema,
\(X = \left( {\begin{array}{*{20}{c}}{{x_1}}\\{{x_2}}\\ \vdots \\{{x_n}}\end{array}} \right) \in {\mathbb{R}^{{\rm{nx}}1}}{\rm{\;}}\) la matriz columna de las incógnitas, y
\(B = \left( {\begin{array}{*{20}{c}}{{b_1}}\\{{b_2}}\\ \vdots \\{{b_m}}\end{array}} \right) \in {\mathbb{R}^{{\rm{mx}}1}}\) la columna de los términos independientes.
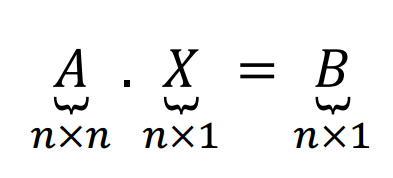
Por lo tanto, la expresión matricial de un sistema de ecuaciones lineales es:
\[AX = B\]
Si \(\;B = O\) , el sistema se llama homogéneo.
Repaso de SCD, SCI Y SI
Los sistemas de ecuaciones lineales pueden tener una única solución (sistema compatible determinado), infinitas soluciones (sistema compatible indeterminado), o bien pueden no admitir solución (sistema incompatible).
Los sistemas homogéneos siempre son compatibles porque admiten al menos la solución trivial \(X = O\) .
Sistemas de ecuaciones lineales y determinantes
Consideremos el caso particular de los «sistemas cuadrados» (\(n\) ecuaciones con \(n\) incógnitas), cuya matriz de coeficientes es de \(n\times n\). Su expresión matricial es:
Si \({\rm{det}}\left( A \right) \ne 0\), \(A\) es inversible. Multiplicando ambos miembros por \({A^{ – 1}}\) se obtiene:
\[\;\;{A^{ – 1}}A\;X = {A^{ – 1}}B\]
\[ \Rightarrow \;\;\;X = {A^{ – 1}}B\]
Como la inversa de una matriz es única, entonces el sistema tiene una única solución \(X = {A^{ – 1}}B\).
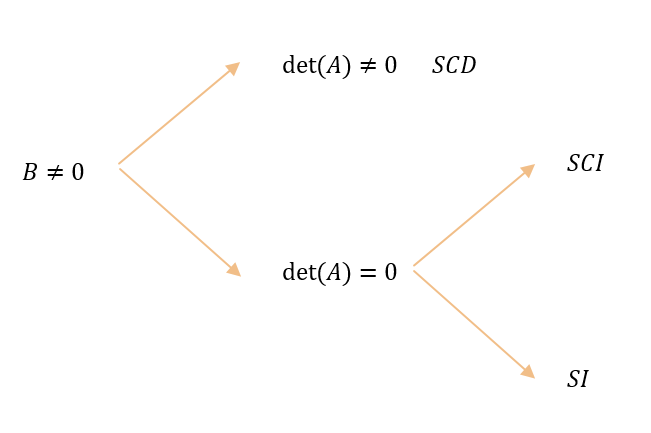
En conclusión, dado un sistema de ecuaciones lineales \(AX = B\), con \(A \in {\mathbb{R}^{n \times n}}\):
Ejemplo
Exprese el siguiente sistema de ecuaciones lineales como una ecuación matricial de la forma \(AX = B\):
\[\left\{ {\begin{array}{*{20}{c}}{ – {x_1} + 2{x_3} = 1}\\{{x_1} – {x_2} = – 2}\\{{x_2} + {x_3} = – 1}\end{array}} \right.\]
Resolución
El sistema lo podemos expresar como:
\[\;\;\;\;\;\;\left( {\begin{array}{*{20}{c}}{ – 1}&0&2\\1&{ – 1}&0\\0&1&1\end{array}} \right)\left( {\begin{array}{*{20}{c}}{{x_1}}\\{\begin{array}{*{20}{c}}{{x_2}}\\{{x_3}}\end{array}}\end{array}} \right) = \left( {\begin{array}{*{20}{c}}1\\{\begin{array}{*{20}{c}}{ – 2}\\{ – 1}\end{array}}\end{array}} \right)\]
Calculemos el determinante de \(A\) por la fila 3:
\[\det \left( A \right) = 0.{\left( { – 1} \right)^{3 + 1}}\left| {\begin{array}{*{20}{c}}0&2\\{ – 1}&0\end{array}} \right| + 1.{\left( { – 1} \right)^{3 + 2}}\left| {\begin{array}{*{20}{c}}{ – 1}&2\\1&0\end{array}} \right| + 1.{\left( { – 1} \right)^{3 + 3}}\left| {\begin{array}{*{20}{c}}{ – 1}&0\\1&{ – 1}\end{array}} \right| = 2 + 1 = 3\]
Como el determinante de \(A\) es distinto de \(0\), podemos hallar \({A^{ – 1}}\):
\[{A^{ – 1}} = \frac{1}{{\det \left( A \right)}}{\left( {\begin{array}{*{20}{c}}{ – 1}&{ – 1}&1\\2&{ – 1}&1\\2&2&1\end{array}} \right)^T} = \frac{1}{3}\;\left( {\begin{array}{*{20}{c}}{ – 1}&2&2\\{ – 1}&{ – 1}&2\\1&1&1\end{array}} \right) = \left( {\begin{array}{*{20}{c}}{ – \frac{1}{3}}&{\frac{2}{3}}&{\frac{2}{3}}\\{ – \frac{1}{3}}&{ – \frac{1}{3}}&{\frac{2}{3}}\\{\frac{1}{3}}&{\frac{1}{3}}&{\frac{1}{3}}\end{array}} \right)\]
Como vimos previamente, la solución será:
\[\;X = {A^{ – 1}}B\]
\[X = \left( {\begin{array}{*{20}{c}}{ – \frac{1}{3}}&{\frac{2}{3}}&{\frac{2}{3}}\\{ – \frac{1}{3}}&{ – \frac{1}{3}}&{\frac{2}{3}}\\{\frac{1}{3}}&{\frac{1}{3}}&{\frac{1}{3}}\end{array}} \right)\left( {\begin{array}{*{20}{c}}1\\{\begin{array}{*{20}{c}}{ – 2}\\{ – 1}\end{array}}\end{array}} \right) = \left( {\begin{array}{*{20}{c}}{ – \frac{7}{3}}\\{ – \frac{1}{3}}\\{ – \frac{2}{3}}\end{array}} \right)\]
Ejemplo
Consideremos el siguiente sistema:
\[\left\{ {\begin{array}{*{20}{c}}{x + 2y – z = 1}\\{ – x + y + 2z = 3}\\{x + 5y = 5}\end{array}} \right.\]
¿Qué representa geométricamente cada ecuación? Un plano.
¿Qué representa geométricamente la solución del sistema de ecuaciones? La intersección entre tres planos.
¿Cómo puede ser la intersección entre dos planos? Y entonces, ¿cómo es esperable que sea la intersección entre tres planos?
\[\left( {\begin{array}{*{20}{c}}1&2&{ – 1}\\{ – 1}&1&2\\1&5&0\end{array}} \right)\left( {\begin{array}{*{20}{c}}x\\{\begin{array}{*{20}{c}}y\\z\end{array}}\end{array}} \right) = \left( {\begin{array}{*{20}{c}}1\\{\begin{array}{*{20}{c}}3\\5\end{array}}\end{array}} \right)\]
Como \(\det \left( A \right) = 0\) , no podemos resolver el sistema mediante la matriz inversa. El sistema no es compatible determinado. Pero…. ¿podemos afirmar que no tiene solución?
Podría ocurrir que el sistema tuviera infinitas soluciones o que fuera incompatible. Para analizar esas alternativas utilizaremos el método de eliminación de Gauss.
Recordemos que las operaciones elementales entre filas son:
- Multiplicar una fila por un número diferente de cero
- Permutar filas
- Sumarle a una fila un múltiplo de otra
Estas operaciones transforman un sistema en otro equivalente que tiene el mismo conjunto solución:
\[\left( {\begin{array}{*{20}{c}}1&2&{ – 1}&1\\{ – 1}&1&2&3\\1&5&0&5\end{array}} \right)\overrightarrow {{F_3} \to {F_3} – {F_1}} \;\left( {\begin{array}{*{20}{c}}1&2&{ – 1}&1\\{ – 1}&1&2&3\\0&3&1&4\end{array}} \right)\]
\[\overrightarrow {{F_2} \to {F_2} + {F_1}} \left( {\begin{array}{*{20}{c}}1&2&{ – 1}&1\\0&3&1&4\\0&3&1&4\end{array}} \right)\;\overrightarrow {{F_3} \to {F_3} – {F_2}} \;\left( {\begin{array}{*{20}{c}}1&2&{ – 1}&1\\0&3&1&4\\0&0&0&0\end{array}} \right)\]
Entonces un sistema de ecuaciones equivalente (tiene el mismo conjunto solución) y simplificado es:
\[\left\{ {\begin{array}{*{20}{c}}{x + 2y – z = 1}\\{3y + z = 4}\end{array}} \right.\;\; \Rightarrow \left\{ {\begin{array}{*{20}{c}}{x = 1 + z – 2y}\\{z = 4 – 3y}\end{array}} \right.\;\; \Rightarrow \left\{ {\begin{array}{*{20}{c}}{x = 1 + 4 – 3y – 2y = 5 – 5y}\\{z = 4 – 3y}\end{array}} \right.\;\]
\[ \Rightarrow \left\{ {\begin{array}{*{20}{c}}{x = 5 – 5y}\\{z = 4 – 3y}\end{array}} \right.\]
Entonces la solución es:
\[S = \left\{ {\left( {x,y,z} \right) \in {\mathbb{R}^3}\;|\;x = 5 – 5y\;\;\;,\;\;\;\;z = 4 – 3y} \right\} = \left\{ {\left( {5 – 5y,y,4 – 3y} \right) \in {\mathbb{R}^3}\;\;|\;\;\;y \in \mathbb{R}} \right\}\]
\[\left( {5 – 5y,y,4 – 3y} \right) = \left( {5,0,4} \right) + \left( { – 5y,y, – 3y} \right) = \left( {5,0,4} \right) + y\left( { – 5,1, – 3} \right)\]
Si llamamos \(y = \lambda \) , resulta:
\[\left( {x,y,z} \right) = \left( { – 5,0,4\;} \right) + \lambda \left( { – 5,1, – 3} \right)\;\;\;\;,\;\;\;\lambda \in \;\mathbb{R}\]
Como el conjunto solución es una recta, podemos concluir que los tres planos pasan por la misma recta, o sea pertenecen al mismo haz de planos.
Ejemplo
Dado un sistema tal que \(\det \left( A \right) = 0\) , ¿podemos afirmar que admite infinitas soluciones?
Veamos el siguiente ejemplo en el cual la matriz de los coeficientes es la misma que en el ejemplo anterior:
\[\left\{ {\begin{array}{*{20}{c}}{x + 2y – z = 1}\\{ – x + y + 2z = 3}\\{x + 5y = 0}\end{array}} \right.\]
Resolvamos con el método de Gauss:
\[\left( {\begin{array}{*{20}{c}}1&2&{ – 1}&1\\{ – 1}&1&2&3\\1&5&0&0\end{array}} \right)\overrightarrow {{F_3} \to {F_3} – {F_1}} \;\left( {\begin{array}{*{20}{c}}1&2&{ – 1}&1\\{ – 1}&1&2&3\\0&3&1&{ – 1}\end{array}} \right)\]
\[\overrightarrow {{F_2} \to {F_2} + {F_1}} \left( {\begin{array}{*{20}{c}}1&2&{ – 1}&1\\0&3&1&4\\0&3&1&{ – 1}\end{array}} \right)\;\overrightarrow {{F_3} \to {F_3} – {F_2}} \;\left( {\begin{array}{*{20}{c}}1&2&{ – 1}&1\\0&3&1&4\\0&0&0&{ – 5}\end{array}} \right)\]
La lectura de la tercera fila implica que \(0 = – 5\). Este absurdo significa que el sistema de ecuaciones no tiene solución.
En los ejemplos anteriores observamos que si el determinante de la matriz de coeficientes es igual a cero, el sistema puede ser compatible indeterminado o incompatible.
Caso particular: Sistemas cuadrados homogéneos
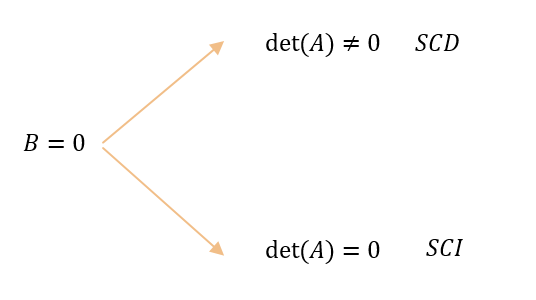
Recordemos que todo sistema homogéneo es compatible porque admite al menos la solución trivial \(X = O\) . En este caso, el determinante permite clasificar el sistema.
Dado un sistema homogéneo \(AX = O\;\;\;\;,\;\;con\;\;A \in {\mathbb{R}^{nxn}}\), puede afirmarse que:
\[\det \left( A \right) \ne \;0\;\; \Rightarrow \;SCD\]
\[\det \left( A \right) = 0\;\; \Rightarrow \;\;SCI\;\;\]
Resumen: Clasificación de un sistema \(n \times n\) por determinantes.
Dado un sistema de ecuaciones lineales \(AX = B\) , con \(A \in {\mathbb{R}^{n \times n}}\):
Si el sistema de ecuaciones lineales es homogéneo:
Ejemplo
Dadas \(A = \left( {\begin{array}{*{20}{c}}1&1&0\\0&2&{3k}\\3&k&{ – 3}\end{array}} \right)\;\;y\;\;B = \left( {\begin{array}{*{20}{c}}2\\2\\4\end{array}} \right)\) , hallar todos los valores de k para los cuales:
a) el sistema \(AX = O\) admite infinitas soluciones;
b) el sistema \(AX = B\) admite infinitas soluciones.
Resolución
a) Como el sistema es homogéneo, \(\det \left( A \right) = 0 \Rightarrow SCI\)
\[\det \left( A \right) = – 3{k^2} + 9k – 6 = 0 \Leftrightarrow k = 1 \vee k = 2\]
Por lo tanto, el sistema admite infinitas soluciones para \(k = 1\;\; \vee \;\;k = 2\).
b) En este caso el sistema no es homogéneo, por lo tanto el determinante no permite decidir si el sistema es compatible indeterminado. Les proponemos que resuelvan el sistema y respondan la pregunta.
Ejercicio para el lector 7
Sean el plano \(\pi :\;\;x + y – 2 = 0\) y la recta \(r\;:\;\left\{ {\;\begin{array}{*{20}{c}}{2y + 3kz – 2 = 0}\\{3x + ky – 3z – 4 = 0}\end{array}} \right.\)
Obtener los valores de k para los cuales:
a) la recta corta al plano en un único punto;
b) la recta no interseca al plano;
c) la recta está incluida en el plano.
Sugerencia: Este ejercicio puede responderse sin hacer cálculos, teniendo en cuenta los resultados del ejemplo anterior.
