Definición y ecuación canónica de la elipse
\[\mathcal{E} = \left\{ {P\left( {x,y} \right)\;|\;d\left( {P,{F_1}} \right) + d\left( {P,{F_2}} \right) = cte} \right\}\]
A esa constante la llamamos \(2a\).
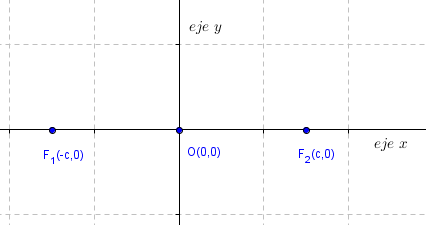
Consideremos que los focos son los puntos de coordenadas \({F_1}\left( { – c,0} \right)\) y \({F_2}\left( {c,0} \right)\) con \(c > 0\), y el punto medio entre los focos, se denomina centro \(C\left( {0,0} \right)\). En el siguiente esquema se pueden visualizar estos elementos:
Si la distancia entre los focos es \(d\left( {{F_1},{F_2}} \right) = 2c\) , la condición para que sea una elipse es:
\[a > c > 0\]
Si elevamos al cuadrado:
\[{a^2} > {c^2}\]
A la diferencia se la llama \({b^2}\):
\[{a^2} – {c^2} = {b^2}\;\]
\[ \Rightarrow {a^2} = {b^2} + {c^2}\]
Haciendo una deducción se llega a:
Es la ecuación canónica de la elipse con centro \(\left( {0,0} \right)\) y eje focal \(y = 0\)(eje \(x\)).
Busquemos las intersecciones con los ejes:
Si \(y = 0\;:\;\;\) \(\;{x^2} = {a^2} \Rightarrow x = \pm a\;\; \Rightarrow {V_{1,2}} = \left( { \pm a,0} \right)\)
Si \(x = 0\;:\) \(\;\;\;{y^2} = {b^2} \Rightarrow y = \pm b\;\; \Rightarrow {V_{3,4}} = \left( {0, \pm b} \right)\)
Estos cuatro puntos se denominan vértices de la elipse.
-
- \(a\) se denomina semieje mayor
- \(b\) es el semieje menor
- \(c\) es la semidistancia focal: (distancia del centro a un foco)
- 2c es la distancia entre los focos
- Eje focal: es la recta que pasa por los focos, en este caso el eje x
La gráfica representando todos estos elementos es la siguiente:
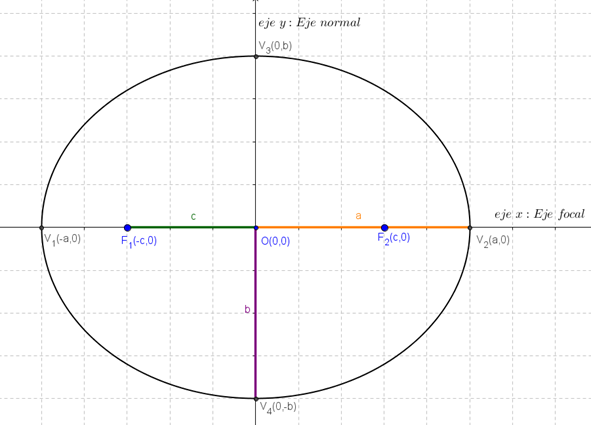
Observen que el centro es centro de simetría de la elipse.
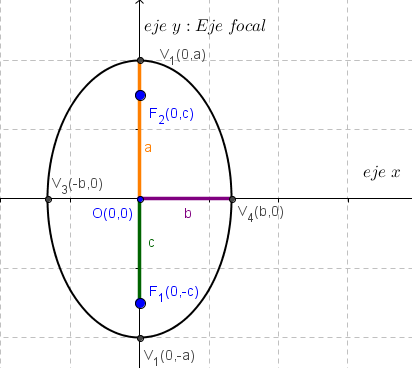
Si en la ecuación canónica anterior permutamos x por y ( x\( \leftrightarrow \)y) queda:
Es la ecuación canónica de la elipse con centro\(\left( {0,0} \right)\) y eje focal \(x = 0\) (eje \(y\)).
En este caso las coordenadas de los vértices y focos son:
-
-
- Vértices: \({V_1}\left( {0,a} \right)\), \({V_2}\left( {0, – a} \right)\), \({V_3}\left( { – b,0} \right)\), \({V_4}\left( {b,0} \right)\)
- Focos: \({F_1}\left( {0, – c} \right)\), \({F_2}\left( {0,c} \right)\)
-
Su gráfica es:
Excentricidad de una elipse
La excentricidad de una elipse se calcula como el cociente:
\[e = \frac{c}{a}\]
Donde \(a\) es el semieje mayor y \(c\) es la distancia del centro a uno de los focos.
Cómo \(0 < c < a\):
\[ \Rightarrow \;0 < \frac{c}{a} < 1\]
Por lo tanto la excentricidad de una elipse varía entre cero y uno.
En el siguiente archivo de GeoGebra pueden moverse los focos y un punto de la elipse para definirla. Además el programa calcula automáticamente la excentricidad.
Exploren cómo va cambiando la forma de la elipse en relación con la excentricidad.
Ejemplo 1
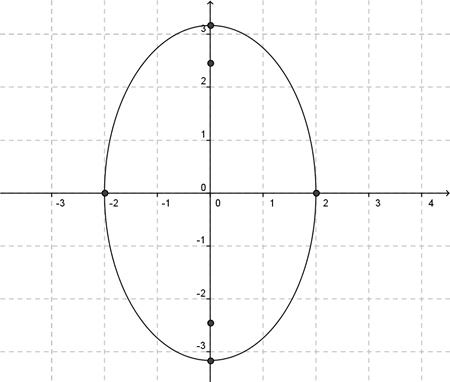
Hallar vértices, focos, eje focal, graficar y calcular excentricidad de la siguiente elipse:
\[\frac{{{x^2}}}{4} + \frac{{{y^2}}}{{10}} = 1\]
Resolución
Calculemos los valores de \(a\) y \(b\):
\[{a^2} = 10 \Rightarrow a = \sqrt {10} \]
\[{b^2} = 4 \Rightarrow b = 2\]
Entonces podemos dar las coordenadas de los vértices:
\[{V_1}\left( {0,\sqrt {10} } \right)\;\;;\;\;{V_2}\left( {0, – \sqrt {10} } \right)\;\;\;;\;\;\;{V_3}\left( {2,0} \right)\;\;\;;\;\;\;\;{V_4}\left( { – 2,0} \right)\;\;\]
Eje focal: es el eje \(y\), porque el denominador de \({y^2}\) es mayor que el denominador de \({x^2}\).
Para hallar las coordenadas de los focos necesitamos calcular \(c\):
\[{c^2} = {a^2} – {b^2} = 10 – 4 = 6\]
\[{F_1}\left( {0, – \sqrt 6 } \right)\;\;y\;\;{F_2}\left( {0,\sqrt 6 } \right)\]
Excentricidad de la elipse:
\[e = \frac{c}{a} = \frac{{\sqrt 6 }}{{\sqrt {10} }} = \sqrt {\frac{3}{5}} \]
La gráfica es:
Ejemplo 2
Hallar la ecuación de una elipse con focos \({F_1}\left( {1, – 1} \right)\) y \({F_2}\left( {1,3} \right)\) y excentricidad \(\;e = 0,4\;.\)
Resolución
Empecemos graficando los focos y el centro:
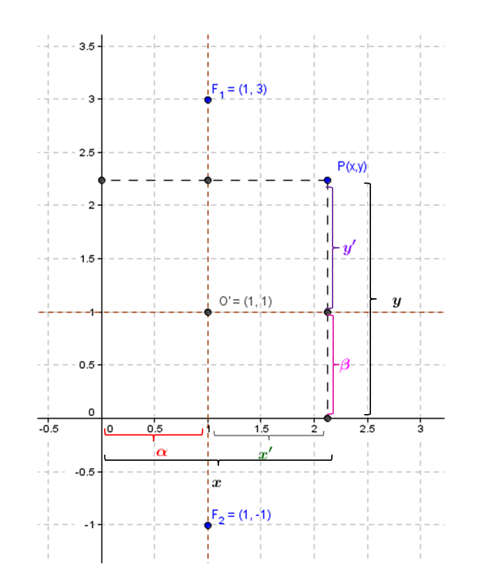
La elipse está corrida; no está centrada en \(\left( {0,0} \right)\). ¿Dónde está el centro de la elipse? En el punto medio de los dos focos \(C\left( {1,1} \right)\).
Pero podemos construir un sistema de ejes \(x’y’\) cuyo origen coincida con el centro de la elipse:
Ecuación del eje x’: \({\rm{\;}}y = 1\)
Ecuación del eje y’:\({\rm{\;\;}}x = 1\)
Hacemos una traslación de ejes:
\[\left\{ {\begin{array}{*{20}{c}}{x’ = x – \alpha }\\{y’ = y – \beta }\end{array}} \right.\;\;\]
Teniendo en cuenta las coordenadas del centro:
\[\;\;\left\{ {\begin{array}{*{20}{c}}{x’ = x – 1}\\{y’ = y – 1}\end{array}} \right.\;\]
Entonces en el nuevo sistema de ejes la ecuación quedaría:
\[\frac{{{{y’}^2}}}{{{a^2}}} + \frac{{{{x’}^2}}}{{{b^2}}} = 1\]
Recordemos que \(c\) es la distancia de un foco al centro, así que:
\[c = 2\]
Y conocemos además que la excentricidad es 0,4
\[e = \frac{c}{a}\]
Entonces despejamos de esta expresión \(a\):
\[a = \frac{c}{e} = \frac{2}{{0,4}} = 5\; \Rightarrow {a^2} = 25\]
Calculamos \(b\):
\[{b^2} = 25 – 4 = 21 \Rightarrow b = \sqrt {21} \]
Y ahora volvemos al sistema original
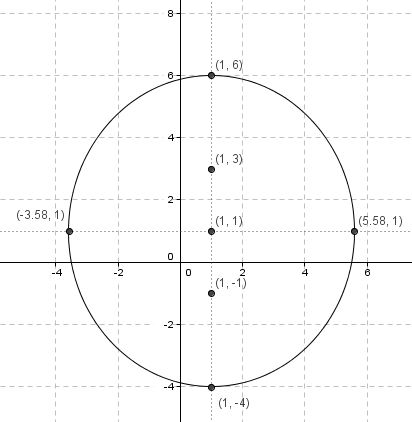
\[\frac{{{{\left( {y – 1} \right)}^2}}}{{25}} + \frac{{{{\left( {x – 1} \right)}^2}}}{{21}} = 1\]
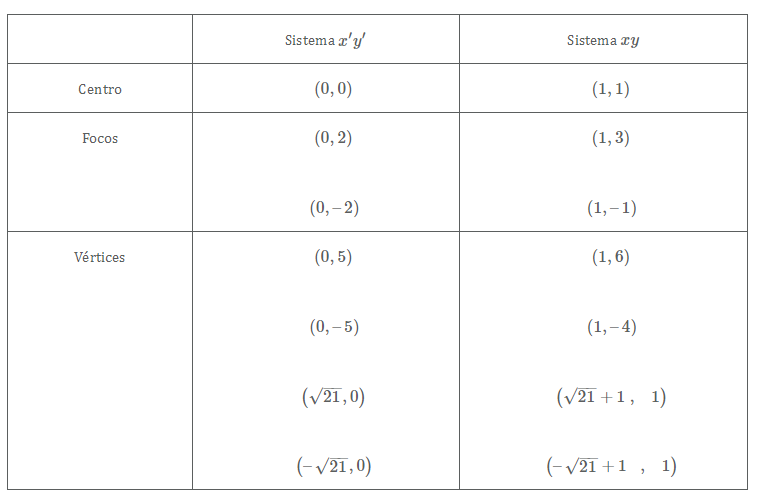
En la siguiente tabla resumimos las coordenadas del centro, focos y vértices en ambos sistemas de referencia:
La gráfica queda:
Ecuación ordinaria de una elipse con \(C\left( {\alpha ,\beta } \right)\)
Si el eje focal es horizontal la ecuación ordinaria es:
\[\frac{{{{\left( {x – \alpha } \right)}^2}}}{{{a^2}}} + \frac{{{{\left( {y – \beta } \right)}^2}}}{{{b^2}}} = 1\]
Si el eje focal es vertical la ecuación ordinaria es:
\[\frac{{{{\left( {y – \beta } \right)}^2}}}{{{a^2}}} + \frac{{{{\left( {x – \alpha } \right)}^2}}}{{{b^2}}} = 1\]
Noten que como \(a > b\), la única diferencia entre las dos ecuaciones consiste en que \({a^2}\) está en el denominador de \(x\) o de \(y\).
Ejemplo 3
Hallar la ecuación ordinaria de la curva definida por:
\[{x^2} + 2{y^2} + 2x – 8y + 7 = 0\]
Graficar.
Resolución
Como el coeficiente de \({x^2}\) y de \({y^2}\) no son el mismo, no puede tratarse de una circunferencia. Tampoco de una parábola porque ninguno de los dos coeficientes es igual a cero. Tampoco de una hipérbola porque tienen el mismo signo. Así que inicialmente esperamos que sea una elipse.
\[{x^2} + 2x + 2.\left( {{y^2} – 4y} \right) + 7 = 0\]
\[{\left( {x + 1} \right)^2} – {1^2} + 2.\left[ {{{\left( {y – 2} \right)}^2} – 4} \right] + 7 = 0\]
\[{\left( {x + 1} \right)^2} + 2.{\left( {y – 2} \right)^2} – 1 – 8 + 7 = 0\]
\[{\left( {x + 1} \right)^2} + 2.{\left( {y – 2} \right)^2} = 2\]
\[\frac{{{{\left( {x + 1} \right)}^2}}}{2} + {\left( {y – 2} \right)^2} = 1\]
Llegamos a la ecuación ordinaria de una elipse con centro en \(\left( { – 1,2} \right)\) y eje focal horizontal (porque el semieje mayor es \(a = \sqrt 2 \) que está en el denominador de \(x\), y el semieje menor es \(b = 1\), está en el denominador de \(y\)). Calculemos \(c\):
\[{c^2} = {a^2} – {b^2} = 2 – 1 = 1\]
Si quisiéramos obtener la ecuación canónica deberíamos establecer las ecuaciones de traslación:
\[\left\{ {\begin{array}{*{20}{c}}{x’ = x + 1}\\{y’ = y – 2}\end{array}\; \Rightarrow \;\;\left\{ {\begin{array}{*{20}{c}}{x = x’ – 1}\\{y = y’ + 2}\end{array}} \right.} \right.\]
\[\frac{{{{x’}^2}}}{2} + {y’^2} = 1\]
Resumamos la información obtenida en los dos sistemas de ejes: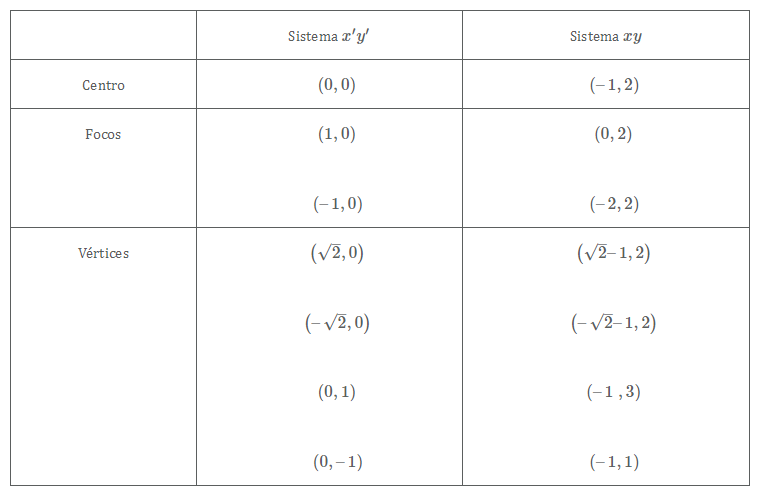
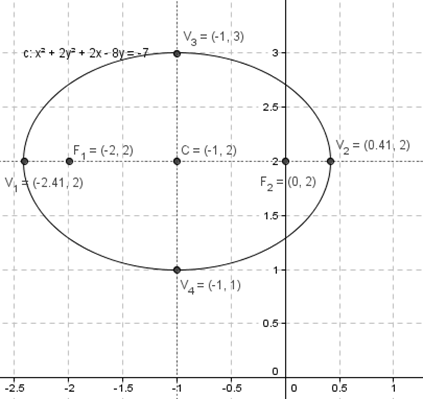
Finalmente podemos hacer la gráfica de la elipse con todos sus elementos:
Videos relacionados
